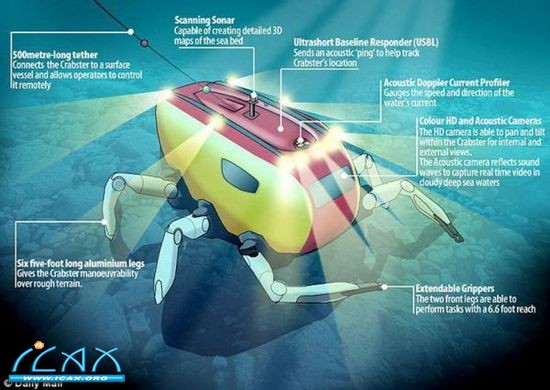
目前,韩国海洋科学和技术研究所最新研制世界上最大、涉水最深的水下行走机器人——Crabster CR200,颇似一只巨大的机器螃蟹,其重量达到635公斤,像一个真实甲壳纲动物能够在海底探索,使用复杂力学将其固定。 预计这种螃蟹机器人可用于科学勘测项目,例如:修复石油和天然气管道等海底设施。在概念视频中,研究小组设想螃蟹机器人抓起物体,装载到类似于大嘴结构的隔间中,可能在实际应用时并不具备这些特征。基于它的体积和重量,这款机器人可以代替水肺潜水员在强洋流下作业,它能够在强洋流下固定,将“头”低下来,抬升尾部,正面迎对洋流。螃蟹机器人装配着11个摄像头,其中包括一个声学相机通过反射声波观测模糊的海水,并拍摄实时视频。一个彩色高清相机可近距离放大勘测目标,并将勘测数据通过一根500米长系链发送,便于操作人员控制螃蟹机器人。 这款机器人使用多普勒仪测量水流的速度和方向,同时声学脉冲可在海底建立通讯确定其位置。机器人可使用声纳建立水环境3D图像,在水下移动时速为1.6公里,它由韩国海洋科学和技术研究所工程师建造,2013年夏季进行首次水下测试。科学家计划Crabster CR200试水200米深度,之后部署在黄海进行海底勘测,帮助考古学家探寻12世纪失事沉船。
|