传送架的静态分析(步骤5-8)
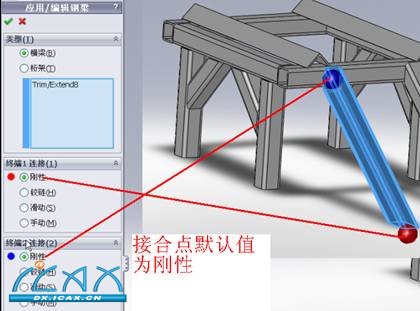
步骤5 定义接合类型:横梁有六个自由度(3个平移和3个旋转) 右击一斜横梁结构→“编辑定义”→与其它横梁连接处定义为铰链→接点处定义为刚性 每个接点都有四个选项
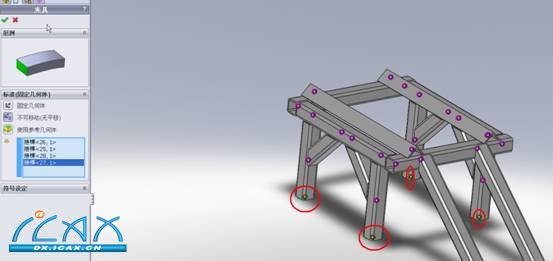
刚性:表示6个自由度都约束到接合处,可通过接合点传递所有力 铰链:端点可自由旋转,不转移任何力矩 滑动:端点可自由平移,不转移任何力 手工:手工指定每个力和力矩分量是否为零 步骤6 添加约束:竖直支脚底部定义“不可移动” 斜支脚添加“固定”
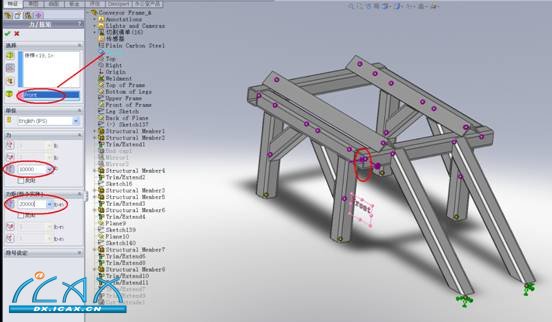
步骤7 添加载荷:在捌角处定义10000lb的力和200000力矩,方向参考Front基准面
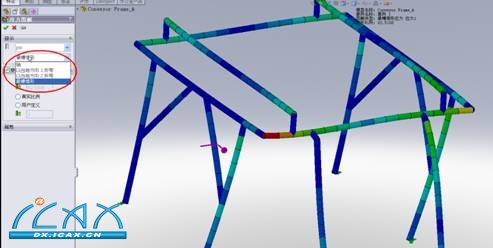
选择力选择【垂直于基准面】力矩使用【沿基准面方向1】 步骤8 查看各种图解
|