万向联接器装配体的静态分析(步骤1-8)
操作步骤: 步骤1、打开装配体文件 步骤2、定义全局单位:通过simulation选项中的“默认选项”确认全局单位为公制【I(MKS)】单位系统长度单位为:毫米,应力单位为:N/mm2。 步骤3、定义静态算例 步骤4、指定材质:右击:“实体”文件夹→“定义材料到所有” →【Alloy Steel】该操作对装配体所有的零件都指定同一材料
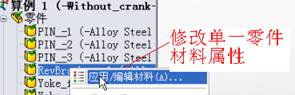
步骤5、修改材质:在整个装配体中有个别零件的材料是不同的,此情况下可在“实体”文件夹下右击RevBracket-1定义材料为:【Aluminum Alloy 1060】
步骤6、添加远程载荷:本模型由于不讨论手柄的应力和变形情况,因此使用远程载荷简化分析。 远程载荷:如果类似支撑臂或摇臂没有建模,该类零件所产生的作用力可通过施加远程载荷模拟。 远程载荷三个选项:【载荷(直接转移)】【载荷/质量(刚性连接)】【位移(刚性连接)】 【载荷(直接转移)】:如果被简化零部件材质比分析零部件柔软的情况下可使用该选项 【载荷/质量(刚性连接)】:适用于简化零件比分析零部件刚硬 【位移(刚性连接)】:适用于简化零件比分析零部件刚硬(此选需要输入位移数值) 加载远程载荷:右击“外部载荷”→“远程载荷/质量” →【载荷(直接转移)】→ 在坐标系中选择“用户定义”→输入数值(X=57.15 Y=24.6 Z=0 )→输入作用力(Z=-2.5N)如图所示 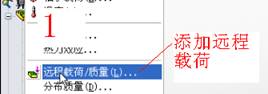 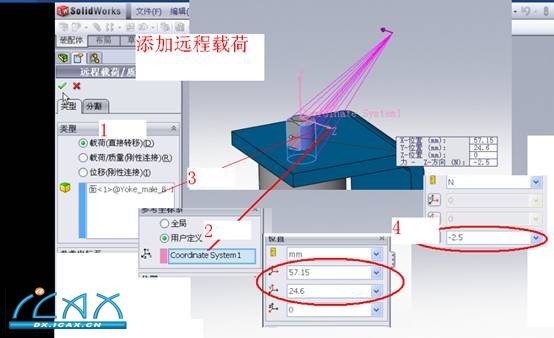 步骤7、定义装配体中所有的接触:装配体中零件与零件之间的相互作用需要使用“相触面组”条件定义。 可使用SOLIDWORKS中的“干涉检查”勾选“视重合为干涉”检验出整个装配体中有哪些面是相互接触的。但这种方法效率比较低,因为需要对每一对面进行单独的接触条件定义 自动定义相触面组:该方法可一次性对所有的接触面组进行“相触面组”的定义。 操作如下:右击“连接”→“查找接触面组”(通过此项可快速找出整个装配体中的接触面)→点选第一个接触面组后按“shift”选择最后一个接触面(把全部面选上)→选择“无穿透”类型→定义“曲面对曲面”→“相触面组” (如需定义面与面之间的摩擦系数,需要进入每个相触面组单独定义)
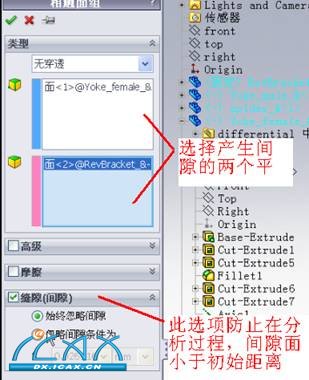
步骤8、定义缝隙:为了防止零件之间的间隙减少,可通过相触面组中的缝隙选项定义。 操作如下:右击“连接”→“相触面组” →“无穿透”类型→选择如下 图所示两个面
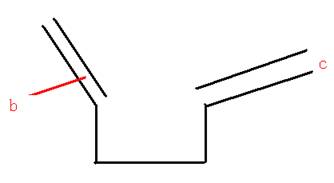
→在缝隙选项中选择“始终忽略间隙” Ps始终忽略间隙:面与面之间间隙不能小于初始距离 忽略间隙条件为:此选项可以定义间隙距值a,当所选源面有多个面时,初始距离小于a的面,结果与“始终忽略间隙”相同,即间隙不能小于初始位置;但如果初始面组的距离大于a,即允许该面组完全接触。参考下图(b≤a≤c)
|