万向联接器装配体的静态分析(步骤9-16)
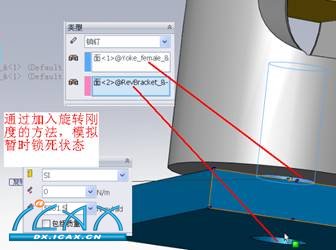
步骤9、定义Yoke_femail与RevBracket间的接头:基于模型不能转动的假设,在两零件间添加销钉接头同时输入旋转刚度:5861.5(K=JG/L J为极惯性矩 G为材料的剪切模量 L为联接长度)
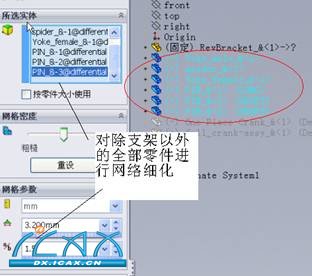
步骤10:定义零件的网格大小:右击“网格”→“网格控制”→选择除RevBracket以外的所有零件进行网格控制:单元大小:3.2mm 比率:1.5→确认。该操作的目的是为了获得更加精确的数据
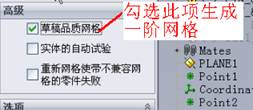
步骤11、对多组的相触面组为了数据的精确度,对多组的相触面组进行网络控制:单元大小:2.5mm 比率:1.5→确认 在进行该操作时先从连接处左击相触面组→右击“网格”→“网格控制” Ps:当相触面组比较多的时候,先在连接中选择所有的面→再右击“网格”→网格控制  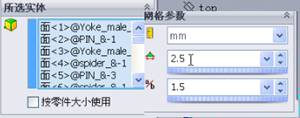 步骤12、对整体装配体进行网格化:“网格”→“生成网格”→“高级”→“草稿品质网格”使用草稿品质主要是为了减少运算量,该做法会在分析中经常用到:对关注零件网格细化,对整体网格粗糙化。
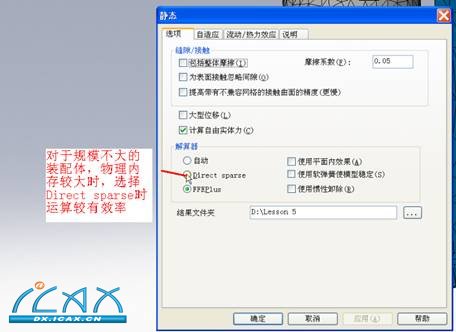
步骤13、通过算例属性指定解算器为Direct Sparse(对于模型规模较小时,并且内存足够大的情况下,使用该选项运算效率高)
步骤14、运算 步骤15、查看动画:右击任一图解选择“动画” 步骤16、(选做)生成新算例把整网格去除“草稿品质网格”选项,实现高品质网格。与算例1作结果比较 总结:本课程重点在使用远程载荷简化分析,对于装配体零件之间的相触面组定义可使用自动定义的方法提高操作速度,同时为了减少运算量又保证运算精度,通过网格控制方法对相触面组和重要零件进行网格细化控制。 |