机器人与自动化规划的新功能
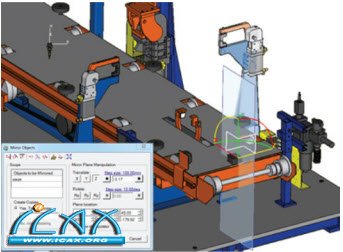
增强的镜像功能,实现更有效的建模与数据重用借助ProcessSimulate中的增强建模功能,可实现整个组件与复合设备的几何及运动学镜像。此外,用户还可以对建模组件中的实体产生镜像。这个新镜像功能与改进后的剖面功能,同样地使用先进的平面控制器。交互式对象预览功能可帮助用户放置镜像平面。
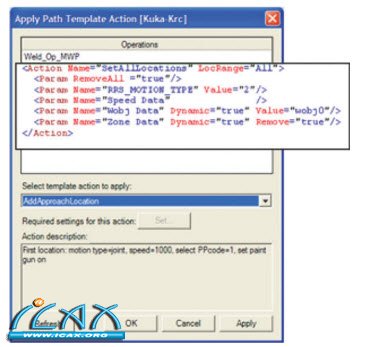
增强的功能可执行更完整的几何与运动学镜像,及实现更高效的建模与数据重用。 机器人工作路径模板,实现更快更高效的路径规划与离线编程ProcessSimulate允许用户定义与应用流程模板,简化机器人工作路径与离线程序编辑。可自主地创建模板,如添加及删除机器人参数、添加及删除OLP命令、添加及编辑路径位置、启动及关闭喷枪等多种操作。这些模板还支持不同的机器人控制器类型。
机器人工作路径模板支持更佳的路径规划自动化与离线程序编写。 单一的流程数据集合,用于时间型与事件型的仿真及编程通过结合规划与验证环境中的工作单元层及装配线层的仿真研究,ProcessSimulate的统一化仿真流程数据类型,可用于时间型仿真与事件型仿真及编程的开发与使用。用户毋需再为其仿真与验证工作创建个别的工程研究内容,数据可在以上两种仿真模式中共享,并支持更详细的下游流程,例如离线编程与虚拟调试。
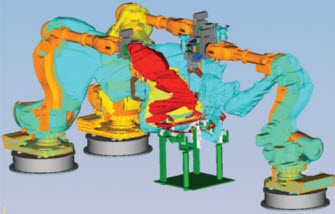
时间型与事件型的仿真运算可使用相同的工程数据集,简化仿真运算的开发与执行。 增强的干扰区域定义与冲突检测在ProcessSimulate中,通过创建与分析扫掠体积,包括根据基于JT™的最终三维几何体积的冲突检测,支持增强的干扰区域定义。往后,操作与干扰体积之间的关系就能轻易地被识别。通过在分析范围中增加冲突组合的渗透值,进一步扩展冲突检测的功能。
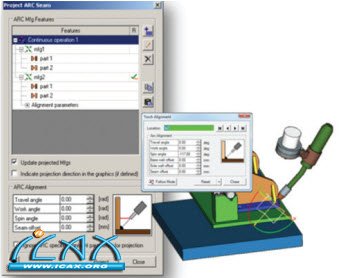
密封扫掠体积功能帮助机器人工作干扰区域的定义,及运动协调同步,有助更明智的决策。 新的弧焊流程应用程序ProcessSimulate现包含一个专用的弧焊流程应用程序,其中包括接缝投影、对齐与方向控制。借助焊炬对齐工具,用户可在投影后控制接缝位置,以支持连续弧焊流程的离线编程与仿真。
专用的用户界面命令支持弧焊流程的仿真、验证与离线编程的开发工作。 |