3 装配与渲染 3.1 装配 3.1.1 装配概述 UG 装配过程是在装配中建立部件之间的链接关系。它是通过关联条件在部件间建立约束来确定部件之间的位置。UG 装配中的零件在装配中的零件在装配中是被引用,而不是复制到装配体中,各级装配文件仅保存该级的装配信息,不保存其子装配及其装配零件的模型信息。不管如何编辑部件在何处编辑部件。整个装配部件保持关联性,如果某部件修改,则引用它的装配自动更新,反映部件的最新变化。图3.1所示是装配工具栏。[8]
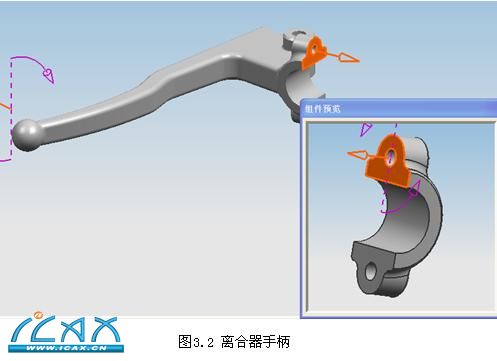
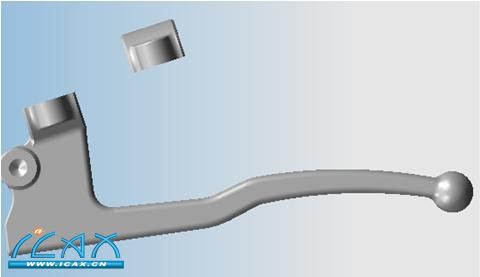
3.1.2装配类型 装配类型用于确定装配中的约束关系,UG中有多种装配类型: 1、装配 该装配类型定位两个同类对象相一致。对于平面对象,用装配约束它们共面且法线方向相反,其创建过程如下: 在[装配条件]对话框中单击如图5-1中的[配对组件]按钮,首先选择图5.2所示的平面左边橙红色的平面,再选择右边橙红色的平面,这是系统将在视图区中显示该约束的自由度,按[确定]组件沿两个平面法线方向的平移运动被约束如图3.3所示,这两个面生命,而其他的均自由。对于圆锥面,系统首先先检查其角度是否相等,则对齐其轴线,其创建过程与平面对象装配约束的创建过程相同[8]。 2、对齐 该装配类型对齐相关对象。当对齐平面时,使两个珍面共面且法线方向相同;当对齐图柱、圆锥和圆环面等对称实体时,是使其轴线相一致;当对齐边缘和线时,是使两者共线。
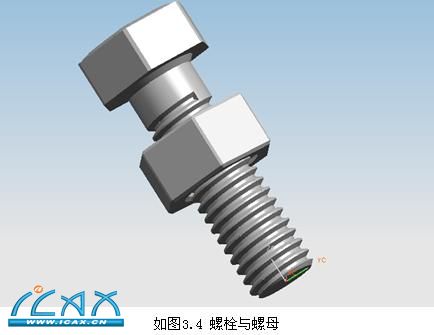
3、角度 该装配类型是在两个对象间定义角度尺寸,用于约束装配组件到正确的方位上。角度约束可以在两个具有方向矢量的对象间产生,角度是两个方向矢量的夹角,这种约束允许关联不同类型的对象。 角度约束有两种类型:二维角度和三维角度。二维角度约束需要一根转轴,两个对象的方向矢量与其垂直。 4、平行 该装配类型约束两个对象的方向矢量彼此平行。 5、垂直 该装配类型约束两个对象的方向矢量彼此垂直 6、中心 该装配类型约束两个对象中心,使其中心对齐,也称为同轴约束。如图3.4 螺栓与螺母。
7、距离 该装配类型约束用于指定两个相关联对象间的最小三维距离,距离可以是正值也可以是负值,正负号确定相关对象是在目标的哪一边。 8、相切 该装配类型约束两个对象相切。 3.1.3 部件的约束状态 每一个对象都有6个自由度,分另是沿x-y平面的移到、沿y-z平面的移动、沿x-z平面的移动和绕xyz三轴的转动。部件可分为三种状态[8]: 1、完成约束状态 完成约束状态是指部件的6个自由度都被约束了。 2、非约束状态 非约束状态是指部件没有一个自由度被约束到,可沿x-y平面的移到、沿y-z平面的移动、沿x-z平面的移动和绕xyz三轴的转动。 3、部分约束状态 部分约束状态是指完成约束状态和非约束状态以外的状态。 3.1.4 综述 在这套拆装过程仿真中,是介绍摩托车的模拟拆装过程的拆装过程仿真,所有设计好的零件装配成一辆有机的机器,这样才可以进行接下来的工作。所有的运动分析和拆装模拟都是在这个有机体上操作的,也只有在装配时才能发现各零件之间的关系,才能证明各个零件的尺寸是否合理,如果合理就让其通过,否则就要找出不合理的原因,回到UG NX4.0的CAD模块对零件的尺寸进行修改,这是一项比较繁琐的工作,也是软件设计的关键步骤。因此在装配摩托车时一定要细心,及时发现问题即时解决。 |