自底向上的装配体建模(步骤50-58)
步骤50 选择子装配体 使用【插入零部件】命令来选择子装配体。 插入零部件对话框列出了【打开文件】列表框中所有打开的零件和装配体,如图1-44所示子装配体crank sub列在其中并被选中。   图1-44 步骤51 放置子装配体 在零件Yoke_male顶部放置子装配体。展开其中所有的零部件和其自身的配合文件夹。 步骤52 添加同轴心配合 使用Alt键+拖动的方法,在零件Yoke_male的顶部圆柱面和零件crank-shaft的圆柱面之间,添加一个【同轴心】配合关系,如图1-45所示。 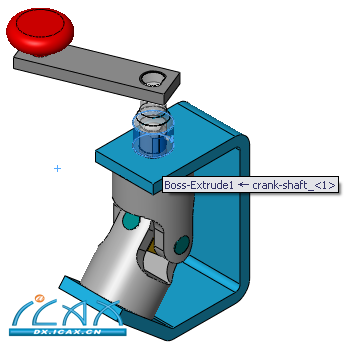 图1-45 步骤53 添加平行配合 使用【配合】工具中的【平行配合】关系来创建零件Yoke_male中的侧平面与零件crank-shaft D形孔侧平面的配合关系。 步骤54 选择对齐方式 本例中,利用配合的反向对齐条件来定位。 单击【反转配合对齐】按钮来检验【反向对齐】(见图1-46)和【同向对齐】(见图1-47),在这里,我们使用【反向对齐】。 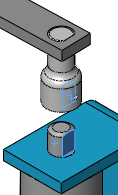 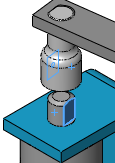 图1-46 图1-47 步骤55 选择表面 选择零件bracket的顶部表面和零件crank-shaft的底部表面来创建距离配合关系,如图1-48所示。 步骤56 添加距离配合 指定距离为1.000mm,如图1-49所示。单击【预览】。如果零件crank-shaft进入到零件bracket内部,则在PropertyManager中选中【反转尺寸】 按钮。单击【确定】创建距离配合关系。 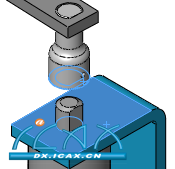  图1-48 图1-49 步骤57 在FeatureManager设计树中选择子装配体 在FeatureManager设计树中选择子装配体crank sub,子装配体中的所有零部件均被选择,并高亮显示,如图1-50所示。 步骤58 装配体动态运动模拟 选择【更改透明度】命令来改变零件Yoke和零件pin的透明度,移动零件crank-arm以显示零件spider的运动,如图1-51所示。 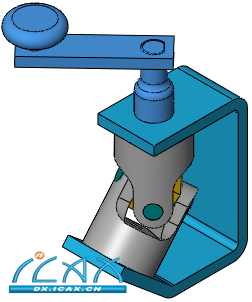 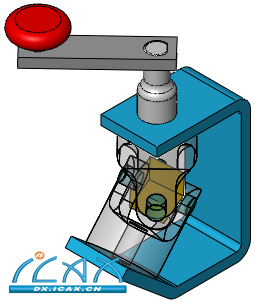 图1-50 图1-51 |


